
What’s the biggest problem right now with humanoid robots? They fall down. Disney seems to have solved that problem here by making robots that are meant to fall down and be caught by a net. Disney’s research arm (you may know them as Imagineers) is showing off a robot called Stuntronic which can perform controlled somersaults as it flies through the air. Check the video below, you really have to watch a few times to make sure this is a robot and not a person.
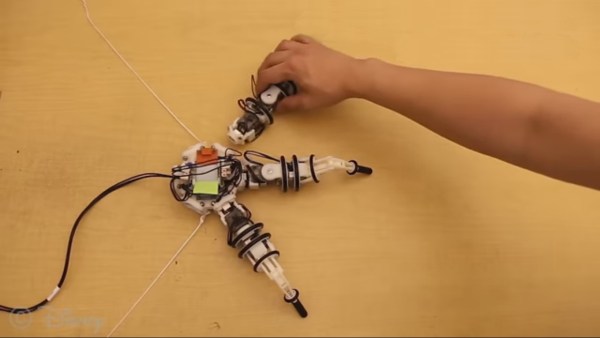
It’s really interesting to follow the evolution of this robot. It began with BRICK, a limbless rectangular bot that could shift its center of gravity to control orientation while moving through the air. From there, Stickman adapted those concepts into a stick-shaped robot that had two hinged portions which allowed for controlled somersaults as it flew through the air. Stuntronic feels like a big leap from that design.
As with Stickman, it can bend to control somersaults mid-air, but with the addition of articulated arms, Stuntronic can also add twists to the acrobatic bag of tricks. To our eye, this is very lifelike and manages to completely escape the uncanny valley. This is a ringing endorsement since one of the proposed purposes of this research is for live performances at Disney’s theme parks.
The Hall of Presidents was a marvel of its time, as robots presented famous speeches while decorated in the likeness of the leaders who originally delivered them. But to stand and deliver is a trick of decades past. We hope this is a trick of next year and not something we’ll have to wake decades into the future to see in person.
Oh, and for those wondering if Stuntronic stuck the landing? The controlled delivery into the net’s warm embrace is equally impressive. Hopefully, successful landings are commonplace because they’re launching these bots with some really wicked force! In addition to the gyroscopes and accelerometers you’d expect to find in a motion-aware machine, the design uses a trio of laser rangefinders that triangulate ground position to spot the optimal landing. We haven’t seen a publication for this bot yet but check the Stickman info for more on these sensors.
Continue reading “Disney’s Humanoid Stunt Robots Throw Multiple Backflips No Sweat”

 In this age of
In this age of 












