We have to hand it to this team, their entry for the 2020 Hackaday Prize is a classic pincer maneuver. A team from [The University of Auckland] in New Zealand and [New Dexterity] is designing a couple of gloves for both rehabilitation and human augmentation. One style is a human-powered prosthetic for someone who has lost mobility in their hand. The other form uses soft robotics and Bluetooth control to move the thumb, fingers, and an extra thumb (!).
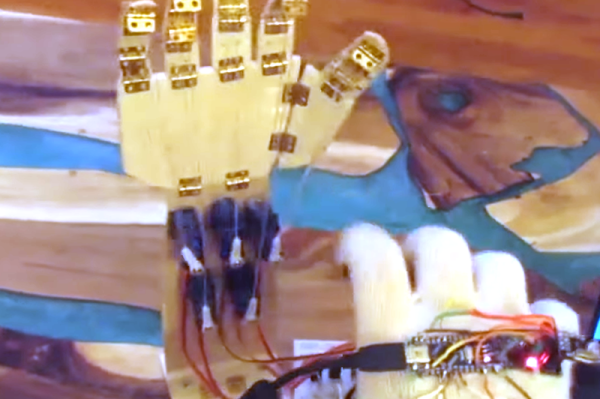
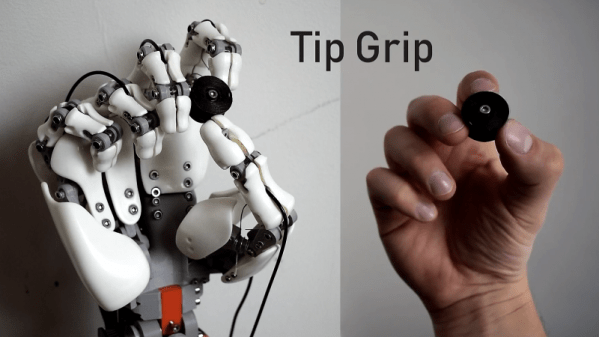
The human-powered exoskeleton places the user’s hand inside a cabled glove. When they are in place, they arch their shoulders and tighten an artificial tendon across their back, which pulls their hand close. To pull the fingers evenly, there is a differential box which ensures pressure goes where it is needed, naturally. Once they’ve gripped firmly, the cables stay locked, and they can relax their shoulders. Another big stretch and the cords relax.
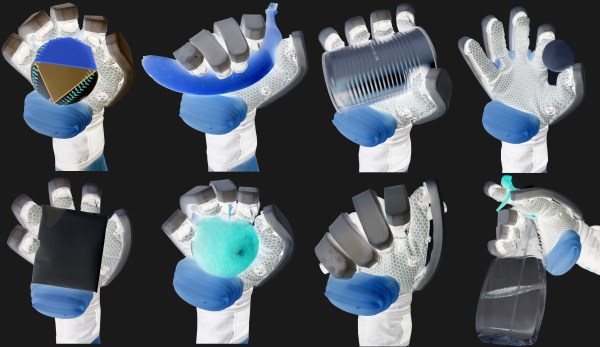
In the soft-robotic model, a glove is covered in inflatable bladders. One set spreads the fingers, a vital physical therapy movement. Another bladder acts as a second thumb for keeping objects centered in the palm. A cable system draws the fingers closed like the previous glove, but to lock them they evacuate air from the bladders, so jamming layers retain their shape, like food in a vacuum bag.
We are excited to see what other handy inventions appear in this year’s Hackaday Prize, like the thumbMouse, or how about more assistive tech that uses hoverboards to help move people?
Continue reading “Assistive Gloves Come In Pairs” →