If you were to plumb the depth of the oceans, you could only get so far with a snorkel or a SCUBA tank. We don’t know the price, but if you have enough money, you might consider the Triton 3300/6 — a six-person submersible that can go down to 3,300 feet (hence the name–get it–3300/6). Billed as “diving for the entire family,” we aren’t sure we can load grandma and the kids in something like this, but that doesn’t mean we wouldn’t like to try.
The machine can carry up to 1,760 pounds and can make 3 knots which isn’t going to set any speed records. At around 24,000 pounds, the two main thrusters are lucky to make that speed. The view bubble is apparently optically perfect acrylic made by a German company and the company claims the 100-inch diameter bubble is the world’s largest spherical acrylic pressure hull.
Underwater exploration and research can be exceedingly dangerous, which is why remotely operated vehicles (ROVs) are so commonly used. Operators can remotely command these small submersibles to capture images or collect samples at depths which would otherwise be unreachable. Unfortunately, such technology comes at a considerable price.
Believing that the high cost of commercial ROVs is a hindrance to aquatic conservation efforts, [Noeël Moeskops] has been developing an open source modular ROV he calls Aruna. Constructed largely from off-the-shelf components and 3D-printed parts, the Aruna promises to be far more affordable than anything currently on the market. Hopefully cheap enough to allow local governments and even citizens to conduct their own underwater research and observations.
More than just the ROV itself, Aruna represents an entire system for developing modular underwater vehicles. Whether you decide to build the boilerplate ROV documented and tested by [Noeël], or implement individual components into your own design, the project is a valuable source of hardware and software information for anyone interested in DIY underwater robotics.
To adequately study a body of water such as a lake, readings and samples need to be taken from an array of depths and locations. Traditionally this is done by a few researchers on a small boat with an assortment of tools that can be lowered to the desired depth, which is naturally a very slow and expensive process. As the demand for ever more granular water quality analysis has grown, various robotic approaches have been suggested to help automate the process.
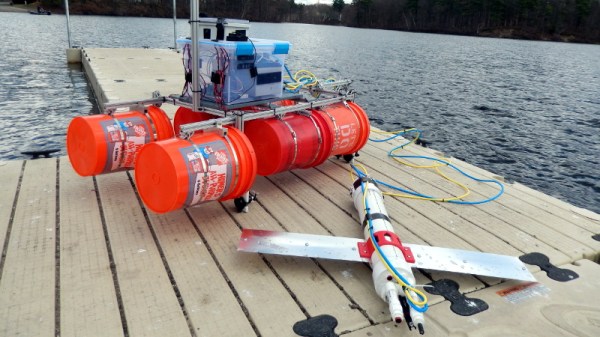
A group of students from Northeastern University in Boston have been working on Project Albatross, a unique combination of semi-autonomous vehicles that work together to provide nearly instantaneous data from above and below the water’s surface. By utilizing open source software and off-the-shelf components, their system promises to be affordable enough even for citizen scientists conducting their own environmental research.
The surface vehicle, assembled from five gallon buckets and aluminum extrusion, uses a Pixhawk autopilot module to control a set of modified bilge pumps acting as thrusters. With ArduPilot, the team is able to command the vehicle to follow pre-planned routes or hold itself in one position as needed. Towed behind this craft is a sensor laden submersible inspired by the Open-Source Underwater Glider (OSUG) that won the 2017 Hackaday Prize.
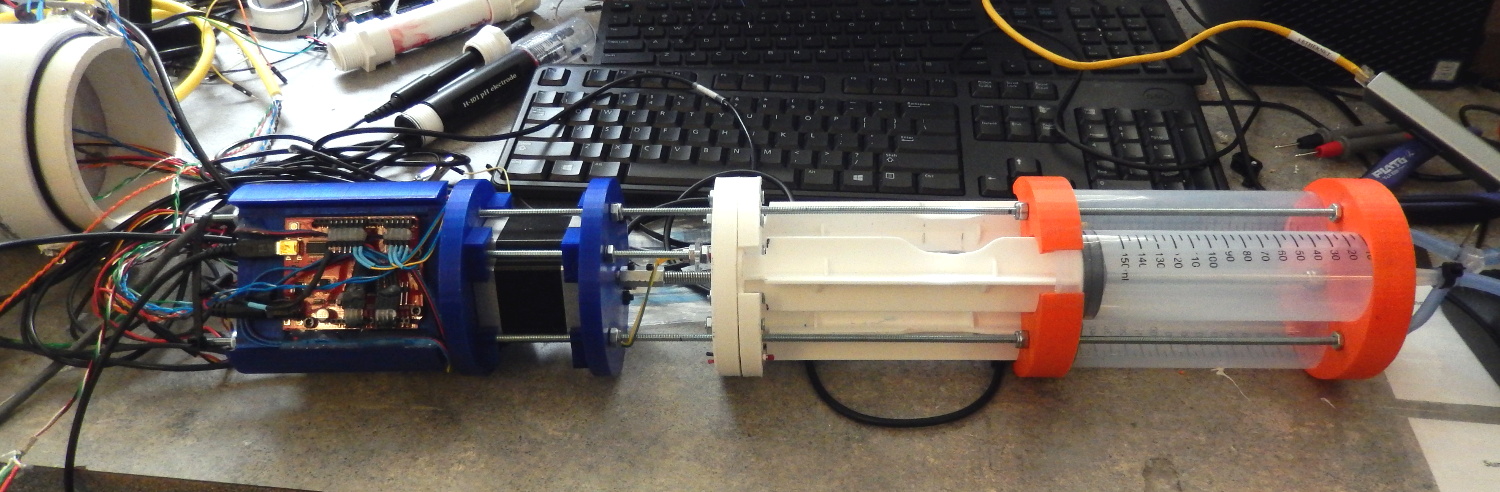
Using an array of syringes operated by a NEMA 23 stepper motor, the glider is able to control its depth in the water by adjusting its buoyancy. The aluminum “wings” on the side of the PVC pipe body prevent the vehicle from rolling will moving through the water. As with the surface vehicle, many of the glider components were sourced from the hardware store to reduce its overall cost to build and maintain.
The tether from the surface vehicle provides power for the submersible, greatly increasing the amount of time it can spend underwater compared to internal batteries. It also allows readings from sensors in the tail of the glider to be transmitted to researchers in real-time rather than having to wait for it to surface. While the team says there’s still work to be done on the PID tuning which will give the glider more finely-grained control over its depth, the results from a recent test run already look very promising.
In Subnautica, players explore an alien underwater landscape with the help of a number of futuristic tools and vehicles. [Robert Cook] found himself particularly enamored with the large submarine you unlock towards the later parts of the game, so much so that he decided to build his own real-life version.
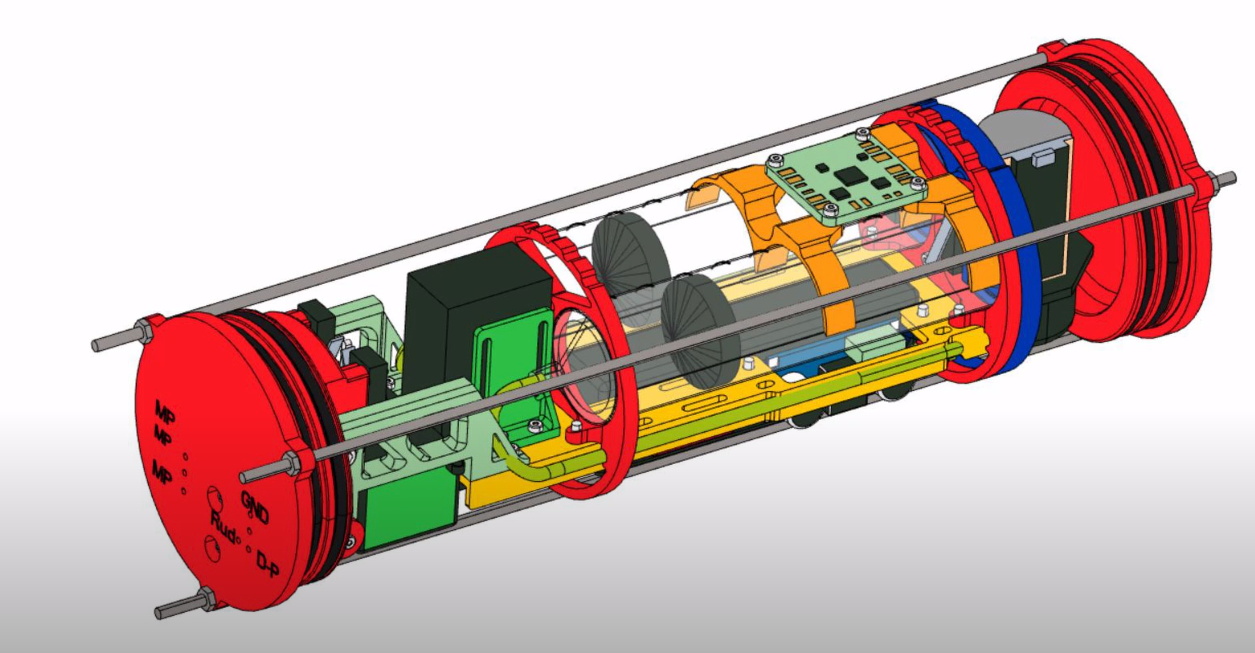
Even though the RC version of the Cyclops [Robert] has designed is only big enough to explore swimming pool sized alien landscapes, it’s by no means a simple build. In fact, the sub’s internal watertight compartment holds an impressive array of electronics and systems that are arguably overkill for what’s essentially a toy. Not that we’re complaining, of course.
Beyond the electronics and a few key components, almost every part of the RC Cyclops has been 3D printed. From the bulkheads that cap off the internal watertight acrylic tube to the hull itself, there’s a lot of plastic aboard this ship. Which might explain why it takes nearly two kilograms of lead weight to get the sub close to neutral buoyancy. From there, a clever ballast tank arrangement made from a syringe and peristaltic pump allow the vehicle to dive and surface on command.
[Robert] is in the process of releasing the STL files for all the submarine’s 3D printed components, and has done an excellent job of documenting the roughly four months he’s spent working on the project in a series of videos on his YouTube channel. The videos contain a wealth of fascinating tips and tricks regarding DIY submersible vehicles, such as selecting the proper radio frequencies for maximum penetration through water and counteracting the permeability of 3D printed parts with a generous coating of epoxy.
Although you’d be hard-pressed to tell in some areas, it’s summer in the northern hemisphere, which always seems to bring out the projects that require a swimming pool for adequate testing. The [Brick Experiment Channel]’s latest build, a submersible made almost entirely from Lego, is one such project and has us pining for weather that makes a dip sensible rather than suicidal.
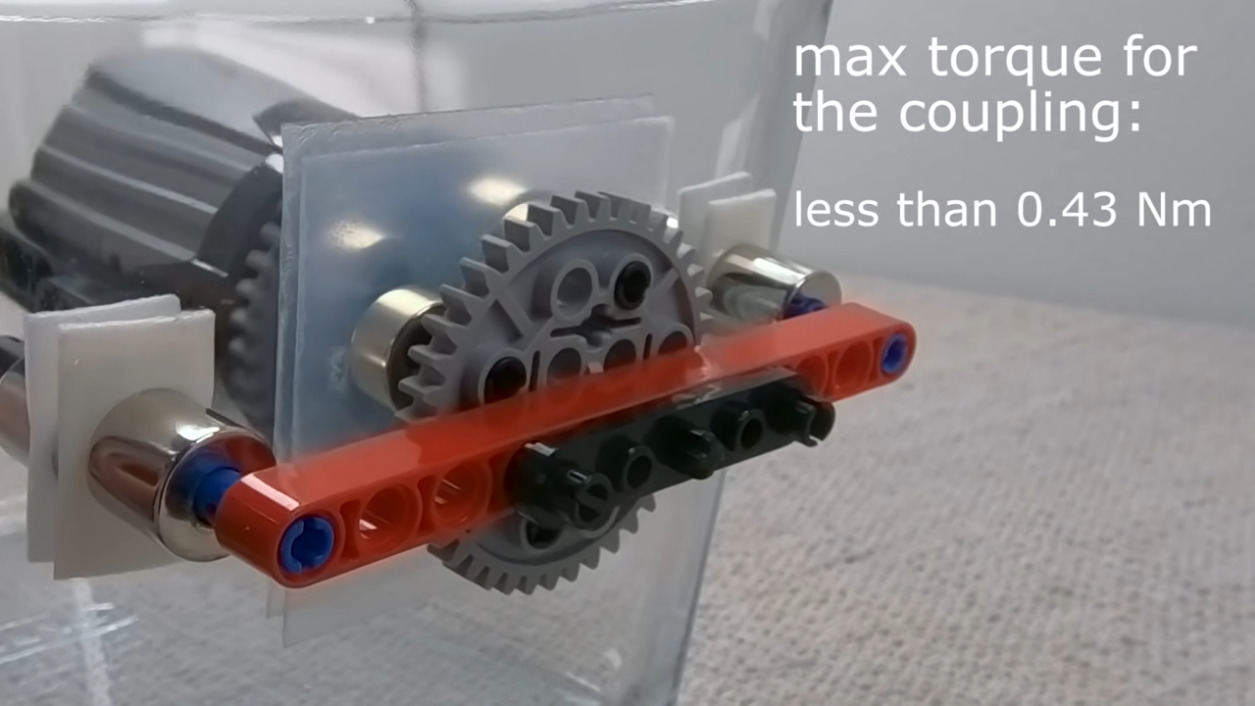
The sub featured in the video below is a significant improvement over the “Sub in a Jug” approach the [Brick Experiment Channel] favored for version 1. Rather than starting with a vessel specifically designed not to hold water, the hull for this vessel is an IKEA food container, with a stout glass body and a flexible lid with silicone seals. And instead of penetrating the hull for driveshafts and attempting to seal them, this time around he built clever magnetic couplings.
The couplings transmit torque from the motors on the inside to gears and props on the outside. And where the first version used a syringe-pump ballast tank to control the depth, this one uses vertical thrusters. The flexible lid proved to be a problem with that scheme, since it tended to collapse as the depth increased, preventing the sub from surfacing. That was solved with some Lego bracing and adjustment of the lead shot ballast used to keep the sub neutrally buoyant.
This looks like a ton of summer fun, and even if you don’t have Legos galore to work with, it could easily be adapted to other materials. There are a ton of other fun [BEC] Lego builds to check out, some of which we’ve covered, including a Lego drone and a playing card shooter.
Space may be the final frontier, but there are still Earthly frontiers that a select few have visited — the deepest depths of the high seas. Victor Vescovo, a Texas businessman and former Naval officer, is one of those few. Last spring, Vescovo realized his dream of becoming the first person to scrape the bottoms of all five oceans.
Vescovo descended alone in Limiting Factor, a $37 million two-seater submersible he commissioned from Triton, a private manufacturer who made this feat of engineering come to life. Vescovo and the crew discovered over 40 new species of aquatic lifeforms throughout the course of their Five Deeps expedition. But the attention-getting takeaway came when Vescovo visited the absolute lowest point on Earth. In the Challenger Deep portion of the Marianas Trench, seven miles below sea level, he saw a plastic bag drift by in the abyss.
One normal-sounding quirk sets this sub apart from others: it’s made to be reusable. You read that right, most super-deep divers never manage to dive over and over again.
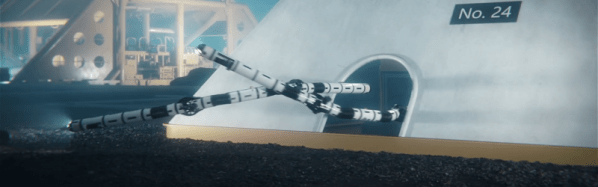
We can’t tell if the Eelume actually exists, or if it’s just a good CG and a design concept, but when we saw the video below, we wanted to start working on our version of it immediately. What’s an Eelume? A robotic eel that lives permanently under the ocean.
If you have to take care of something underwater — like a pipeline — this could be much more cost-effective than sending divers to the ocean floor. We liked the natural motion and we really liked the way the unit could switch batteries and tool heads.
We do have some questions, though. How do you get rid of one battery and pick up another? There would have to be some battery capacity that doesn’t exchange, but that’s not very efficient since the new battery would have to recharge the internal battery. Perhaps you can add batteries at either end. Some of the still pictures don’t clearly show how the batteries fit in, although they do show the flexible joints, sensors, cameras, and thrusters, which are all modular.
According to the web site, tools can go on either end and there’s a robot arm. The device can apparently shape itself like a U to bring both ends to bear on the same area. Generally, we like robots that mimic nature, but this is one of the best examples of that being practical we’ve seen.
There’s a video on the site of what appears to be real hardware tethered in a swimming pool, though we couldn’t tell how much of the device was subject to remote control and how much would be autonomous. Communicating underwater is finicky and usually requires either an antenna on the surface or a very low frequency (and, thus, not much bandwidth). While completely duplicating this would probably be a feat, it might inspire some hacker-friendly eels.