The BYTE, an open-source mouth-actuated input device for people with physical challenges has just been named the Grand Prize winner of the 2020 Hackaday Prize. The award for claiming the top place and title of “Best All Around” in this global engineering initiative is $50,000. Five other top winners and four honorable mentions were also named during this evening’s Hackaday Prize Ceremony, held during the Hackaday Remoticon virtual conference.
This year’s Hackaday Prize focused on challenges put forth by four non-profit partners who have first hand knowledge of the problems that need solving as they work to accomplish their missions. These organizations are Conservation X Labs, United Cerebral Palsy Los Angeles, CalEarth, and Field Ready. Join us below for more on the grand prize winner and to see the Best in Category and Honorable Mention winners from each non-profit challenge, as well as the Best Wildcard project.
For as long as computers have been in the hands of programmers, they have offered frequent mildly tedious tasks that their operators have sought to automate. Who hasn’t written a shell script or a batch file that unites a string of commands into one just to save a bit of typing?
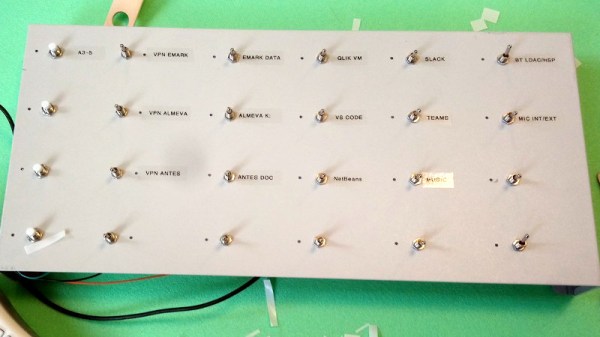
But even that effort can be reduced with a hardware add-on that ties the script to a physical control, and in this endeavor [Tomas] has created a beauty. His control panel project mimics the robust industrial panels of yesteryear with an array of metal buttons and toggle switches in a sturdy metal case sourced from an old KVM switch.
Behind the scenes are a pair of I/O extenders and a NodeMCU board, whose ESP8266 does the talking to the host computer on which a daemon awaits its call. Individual addressable LEDs next to each switch convey the state of operation, and the switches trigger useful operations such as connecting to a VPN. All the code is available in a handy GitHub repository, and you can see it in action in the video we’ve placed below the break.
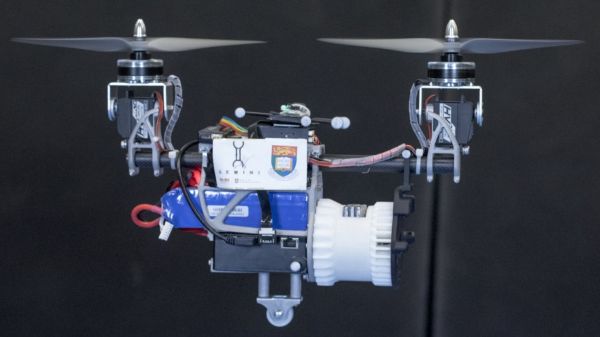
Multirotor aircraft enjoy many intrinsic advantages, but as machines that fight gravity with brute force, energy efficiency is not considered among them. In the interest of stretching range, several air-ground hybrid designs have been explored. Flying cars, basically, to run on the ground when it isn’t strictly necessary to be airborne. But they all share the same challenge: components that make a car work well on the ground are range-sapping dead weight while in the air. [Youming Qin et al.] explored cutting that dead weight as much as possible and came up with Hybrid Aerial-Ground Locomotion with a Single Passive Wheel.
As the paper’s title made clear, they went full minimalist with this design. Gone are the driveshaft, brakes, steering, even other wheels. All that remained is a single unpowered wheel bolted to the bottom of their dual-rotor flying machine. Minimizing the impact on flight characteristics is great, but how would that work on the ground? As a tradeoff, these rotors have to keep spinning even while in “ground mode”. They are responsible for keeping the machine upright, and they also have to handle tasks like steering. These and other control algorithm problems had to be sorted out before evaluating whether such a compromised ground vehicle is worth the trouble.
Happily, the result is a resounding “yes”. Even though the rotors have to continue running to do different jobs while on the ground, that was still far less effort than hovering in the air. Power consumption measurements indicate savings of up to 77%, and there are a lot of potential venues for tuning still awaiting future exploration. Among them is to better understand interaction with ground effect, which is something we’ve seen enable novel designs. This isn’t exactly the flying car we were promised, but its development will still be interesting to watch among all the other neat ideas under development to keep multirotors in the air longer.
Brushless motors can offer impressive torque-to-size ratios, and when combined with complex drive control and sensor feedback, exciting things become possible that expand the usual ideas of what motors can accomplish. For example, to use a DC motor in a robot leg, one might expect to need a gearbox, a motor driver, plus an encoder for position sensing. If smooth, organic motion is desired, some sort of compliant mechanical design would be involved as well. But motors like the IQ Vertiq 6806 offered by [IQ Motion Control] challenge those assumptions. By combining a high-torque brushless DC motor, advanced controller, and position sensing into an integrated device, things like improved drone performance and direct-drive robotic legs like those of the Mini Cheetah become possible.
IQ Vertiq 6806 brushless DC motor with integrated controller, driver, and position sensing.
First, the bad news: these are not cheap motors. The IQ Vertiq 6806 costs $399 USD each through the Crowd Supply pre-order ($1499 for four), but they aren’t overpriced for what they are. The cost compares favorably with other motors and controllers of the same class. A little further than halfway down the Crowd Supply page, [IQ Motion Control] makes a pretty good case for itself by comparing features with other solutions. Still, these are not likely to be anyone’s weekend impulse purchase.
So how do these smart motors work? They have two basic operating modes: Speed and Position, each of which requires different firmware, and which one to use depends on the intended application.
The “Speed” firmware is designed with driving propeller loads in mind, and works a lot like any other brushless DC motor with an ESC (electronic speed control) on something like a drone or other UAV. But while the unit can be given throttle or speed control signals like any other motor, it can also do things like accept commands in terms of thrust. In other words, an aircraft’s flight controller can communicate to motors directly in thrust units, instead of a speed control signal whose actual effect is subject to variances like motor voltage level.
The “Position” mode has the motor function like a servo with adjustable torque, which is perfect for direct drive applications like robotic legs. The position sensing also allows for a few neat tricks, like the ability to use the motors as inputs. Embedded below are two short videos showcasing both of these features, so check them out.
We suppose it’s a bit early to call it just yet, but we definitely have a solid contender for Father of the Year. [DIY_Maxwell] made a light-up hockey game for his young son that looks like fun for all ages. Whenever the puck is hit with the accompanying DIY hockey stick (or anything else), it lights up and produces different sounds based on its acceleration.
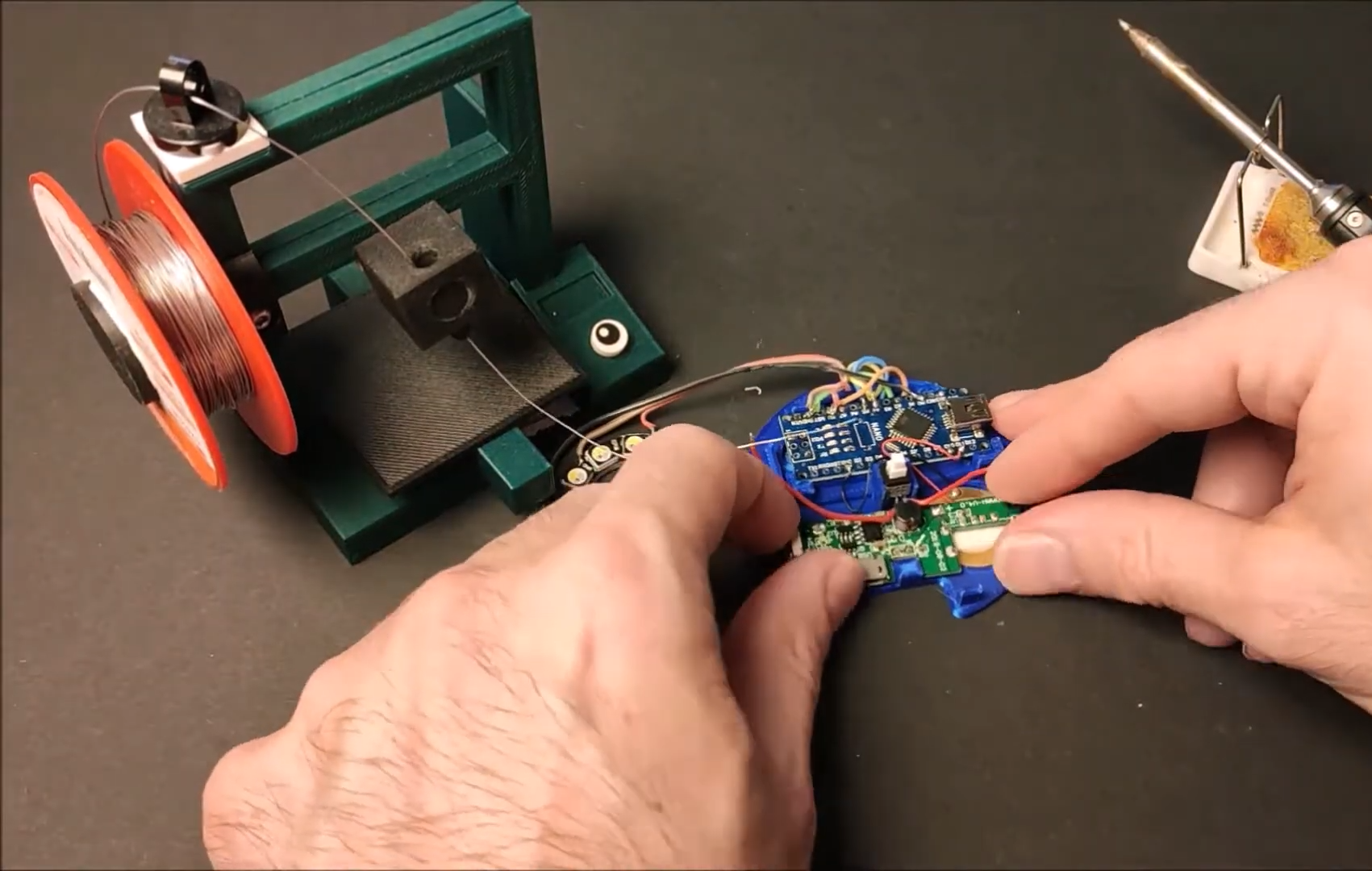
Inside the printed puck is an Arduino Nano running an MPU6050 accelerometer, a 12-NeoPixel ring, and a piezo buzzer. [DIY_Maxell] reused a power bank charging circuit to charge up the small LiPo battery.
The original circuit used a pair of coin cells, but the Arduino was randomly freezing up, probably because of the LEDs’ current draw. Be sure to check out the video after the break, which begins with a little stop motion and features a solder stand in the shape of a 3D printer.
Facebook just announced their plans for the Oculus Quest 2 VR headset. You probably won’t be surprised, but they want more of your user data, and more control over how you use the hardware. To use the device at all, you’ll need a verified Facebook account. Worse, they’re restricting access to the wide world of community-developed applications by requiring a developer account to be able to “sideload” non-Facebook software onto the device. Guess who decides who gets to be a developer. Hint: it’s not the people developing software.
Our article suggests that this will be the beginning of a race to jailbreak the headset on the community’s part, and to get ahead of the hackers on Facebook’s. Like every new release of iOS gets a jailbreak within a week or two, and then Apple patches it up as fast as they can, are we going to see a continual game of hacker cat-and-mouse with Facebook?
I don’t care. And that’s not because I don’t care about open hardware or indie VR developers. Quite the opposite! But like that romance you used to have with the girl who was absolutely no good for you, the toxic relationship with a company that will not let you run other people’s games on their hardware is one that you’re better off without. Sure, you can try to fix it, or hack it. You can tell yourself that maybe Facebook will come around if you just give them one more chance. It’s going to hurt at first.
But in the end, there is going to be this eternal fight between the user and the company that wants to use them, and that’s just sad. I used to look forward to the odd game of cat and mouse, but nowadays the cats are just too well bankrolled to make it a fair fight. If you’re buying a Quest 2 today with the intent of hacking it, I’d suggest you spend your time with someone else. You’re signing up for a string of heartbreaks. Nip it in the bud. You deserve better. There are too many fish in the sea, right?
What are our options?
This article is part of the Hackaday.com newsletter, delivered every seven days for each of the last 200+ weeks. It also includes our favorite articles from the last seven days that you can see on the web version of the newsletter.
Want this type of article to hit your inbox every Friday morning? You should sign up!