In the 1966 science fiction movie Fantastic Voyage, medical personnel are shrunken to the size of microbes to enter a scientist’s body to perform brain surgery. Due to the work of this year’s winners of the Nobel Prize in Physics, laser tools now do work at this scale.
Arthur Ashkin won for his development of optical tweezers that use a laser to grip and manipulate objects as small a molecule. And Gérard Mourou and Donna Strickland won for coming up with a way to produce ultra-short laser pulses at a high-intensity, used now for performing millions of corrective laser eye surgeries every year.
Here is a look at these inventions, their inventors, and the applications which made them important enough to win a Nobel.
AI is currently popular, so [Chirs Lam] figured he’d stimulate some interest in amateur radio by using it to pull call signs from radio signals processed using SDR. As you’ll see, the AI did just okay so [Chris] augmented it with an algorithm invented for gene sequencing.
His experiment was simple enough. He picked up a Baofeng handheld radio transceiver to transmit messages containing a call sign and some speech. He then used a 0.5 meter antenna to receive it and a little connecting hardware and a NooElec SDR dongle to get it into his laptop. There he used SDRSharp to process the messages and output a WAV file. He then passed that on to the AI, Google’s Cloud Speech-to-Text service, to convert it to text.
Despite speaking his words one at a time and making an effort to pronounce them clearly, the result wasn’t great. In his example, only the first two words of the call sign and actual message were correct. Perhaps if the AI had been trained on actual off-air conversations with background noise, it would have been done better. It’s not quite the same issue, but we’re reminded of those MIT researchers who fooled Google’s Inception image recognizer into thinking that a turtle was a gun.
Rather than train his own AI, [Chris’s] clever solution was to turn to the Smith-Waterman algorithm. This is the same algorithm used for finding similar nucleic acid sequences when analyzing genes. It allowed him to use a list of correct call signs to find the best match for what the AI did come up with. As you can see in the video below, it got the call signs right.
Microsoft is bringing ROS to Window 10. ROS stands for Robot Operating System, a software framework and large collection of libraries for developing robots which we recently wrote an introductory article about, It’s long been primarily supported under Linux and Mac OS X, and even then, best under Ubuntu. My own efforts to get it working under the Raspbian distribution on the Raspberry Pi led me to instead download a Pi Ubuntu image. So having it running with the support of Microsoft on Windows will add some welcome variety.
To announce it to the world, they had a small booth at the recent ROSCon 2018 in Madrid. There they showed a Robotis TurtleBot 3 robot running the Melodic Morenia release of ROS under Windows 10 IoT Enterprise on an Intel Coffee Lake NUC and with a ROS node incorporating hardware-accelerated Windows Machine Learning.
Why are they doing this? It may be to help promote their own machine learning products to roboticists and manufacturing. From their recent blog entry they say:
We’re looking forward to bringing the intelligent edge to robotics by bringing advanced features like hardware-accelerated Windows Machine Learning, computer vision, Azure Cognitive Services, Azure IoT cloud services, and other Microsoft technologies to home, education, commercial, and industrial robots.
Initially, they’ll support ROS1, the version most people will have used, but also have plans for ROS2. Developers will use Microsoft’s Visual Studio toolset. Thus far it’s an experimental release but you can give it a try by starting with the details here.
Puzzle boxes are great opportunities for hacking. You can start with a box which was originally used for something else. You get to design circuitry and controls which offer a complex puzzle for the players. And you can come up with a spectacular reward for those who solve it. [thomas.meston’s] Dr. Hallard’s Dream Transmission Box, which he created for an original party game, has all those elements.
The box was a broken 1948 National NC-33 Ham Radio purchased on eBay after a number of failed bids. Most of it was removed except for the speaker. The electronics is Arduino based, so most of the smarts are in the form of code. Potentiometers and a switch provide the mechanism for players to enter codes. And when the correct code is entered, a relay triggers an external smoke machine and turns on a laser which illuminates a party ball, rewarding the victors. And of course, there are also sound effects as well as a recorded message.
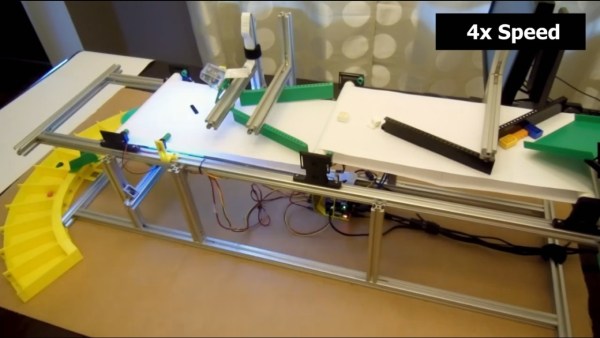
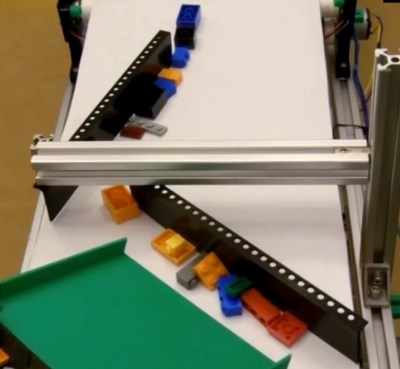
Did you know that chocolate candy production and sorting LEGO bricks have something in common? They both use the same techniques for turning clumps of chocolates or bricks into individual ones moving down a conveyor belt. At least that’s what [Paco Garcia] found out when making his LEGO Sorter.
However, he didn’t find that out right away. He first experimented with his own techniques, learning that if he fed bricks to his conveyor belt by dropping a batch of them in a line perpendicular to the direction of belt travel then no subsequent separation attempt of his worked. He then turned to [akiyuky’s] LEGO sorter for inspiration and dropped them onto the belt at an angle, ensuring that some bricks would be in front of others. A further trick he found is very well demonstrated in the chocolate sorting video below and shown in the image here. That is to use guides on the belt which serve to create speed differentials. Bricks move slower than the conveyor belt while pressed against a guide but when a brick leaves the guide, it accelerates to the speed of the conveyor belt, pulling away from the bricks still at the guide and thus separating them.
A further discovery had nothing to do with chocolate production, unless maybe for quality control. Once an individual brick had been separated out, it had to be classified. To do that he used Google’s Inception v3 neural network. But first, he had to retrain it for recognizing different types of LEGO bricks, something we’ve seen done before for use with recognizing playing cards. And to do the retraining, he needed many images of different bricks all separated into their different types. That’s where he came up with a clever trick. He used his own sorter for that. For example, to get a bunch of images of 1×1 bricks of different colors and orientations, he simply ran them through the sorter, saving the images to files and assigning them to the 1×1 brick class. He then used his desktop machine with a GeForce GT 730 GPU for the retraining, taking around 2.7 seconds per brick. For sorting though, he runs the trained neural network on a Raspberry Pi, taking 3.8 seconds for each brick. The resulting sorter works quite well, sorting with 89% accuracy. Watch it in action in the video below. Continue reading “Sorting LEGO Is Like Making A Box Of Chocolates”→
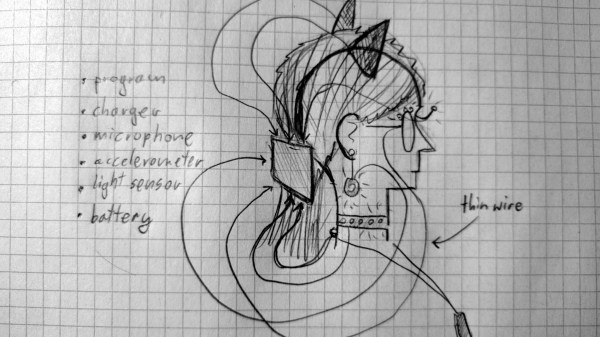
When it comes to wearables, there are a few places you can mount rechargeable batteries and largish circuit boards. Certainly, badges hanging from a lanyard are a favorite here on Hackaday. A belt is another option. [deshipu] has come up with a good location on your head, provided you have long hair that is. That’s the hair clasp or barrette. It can support a hefty mass, be relatively large, and doesn’t touch your skin.
Being able to solder the clasp to the circuit board was his first success and he’s since made a test barrette with pulsing LEDs which he’s distributed to others for evaluation. We really like his electronic hub idea and look forward to seeing where he takes it. For now, he’s done enough to have become a finalist in the Hackaday Human Computer Interface Challenge.
Most of us have been there, some projects just don’t get finished. Everyone shelves an in-progress build from time to time, and some hackers drop almost every project for fully finishing it. Why does it happen? What can we do about it? Or does it even matter? My own most memorable one is the wine glass rack I was making for my sister’s birthday, still sitting incomplete on a shelf eleven years later.
The answer may lie in what you consider to be a “done” project. Is it a fully completed build with every possible feature implemented and polished? With that rubric you could be counting all of your completed projects on one hand. What are you really getting out of your personal projects? It’s an interesting topic to consider as pivoting your mindset can end up boosting your productivity. So let’s dig in!
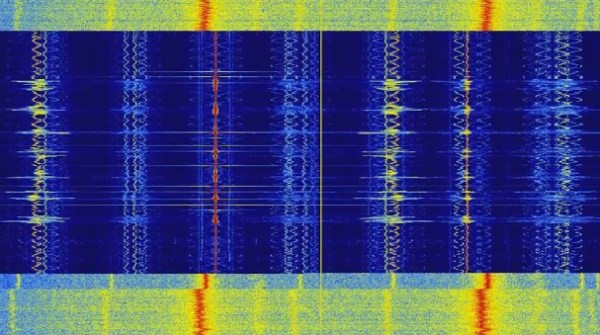
 His experiment was simple enough. He picked up a Baofeng handheld radio transceiver to transmit messages containing a call sign and some speech. He then used a 0.5 meter antenna to receive it and a little connecting hardware and a NooElec
His experiment was simple enough. He picked up a Baofeng handheld radio transceiver to transmit messages containing a call sign and some speech. He then used a 0.5 meter antenna to receive it and a little connecting hardware and a NooElec 


 However, he didn’t find that out right away. He first experimented with his own techniques, learning that if he fed bricks to his conveyor belt by dropping a batch of them in a line perpendicular to the direction of belt travel then no subsequent separation attempt of his worked. He then turned to
However, he didn’t find that out right away. He first experimented with his own techniques, learning that if he fed bricks to his conveyor belt by dropping a batch of them in a line perpendicular to the direction of belt travel then no subsequent separation attempt of his worked. He then turned to