
The Etch A Sketch was never supposed to meet a Raspberry Pi, a camera, or a mathematical algorithm, but here we are. [Tekavou]’s Teka-Cam and TekaSketch are a two-part hack that transforms real photos into quite stunning, line-drawn Etch A Sketch art. Where turning the knobs only results in wobbly doodles, this machine plots out every curve and contour better than your fingertips ever could.
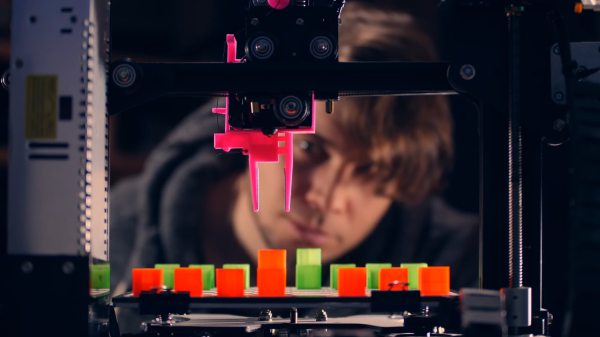
Essentially, this is a software hack mixed with hardware: an RPi Zero W 2, a camera module, Inkplate 6, and rotary encoders. Snap a picture, and the image is conveyed to a Mac Mini M4 Pro, where Python takes over. It’s stripped to black and white, and the software creates a skeleton of all black areas. It identifies corner bridges, and unleashes a modified Chinese Postman Algorithm to stitch everything into one continuous SVG path. That file then drives the encoders, producing a drawing that looks like a human with infinite patience and zero caffeine jitters. Originally, the RPi did all the work, but it was getting too slow so the Mac was brought in.
It’s graph theory turned to art, playful and serious at the same time, and it delivers quite unique pieces. [Tekavou] is planning on improving with video support. A bit of love for his efforts might accellerate his endeavours. Let us know in the comments below!
Continue reading “TekaSketch: Where Etch A Sketch Meets Graph Theory”






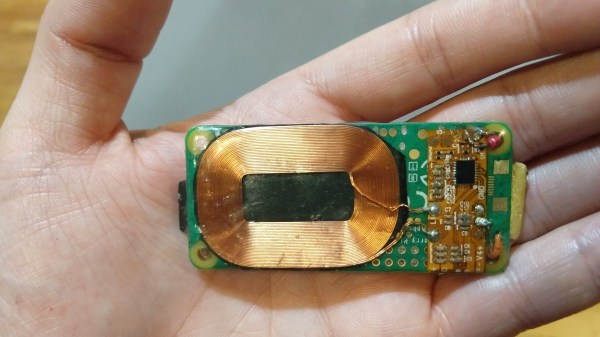
 How does that line end up moving? Sometimes it’s just a matter of what intelligent people can accomplish in a long week. Back in May, during a three-day biohacker convention called Grindfest, someone said something along the lines of, “Wouldn’t it be cool if…” Anyone who has spent an hour in a maker space or hacker convention knows how those conversations go. Rather than ending with a laugh, things progressed at a fever pitch.
How does that line end up moving? Sometimes it’s just a matter of what intelligent people can accomplish in a long week. Back in May, during a three-day biohacker convention called Grindfest, someone said something along the lines of, “Wouldn’t it be cool if…” Anyone who has spent an hour in a maker space or hacker convention knows how those conversations go. Rather than ending with a laugh, things progressed at a fever pitch.










