[Josh] isn’t one to refuse a challenge, especially when robots are involved. The latest dare from friends and family? Build a beer robot that can bring beverages at everyone’s beck and call.
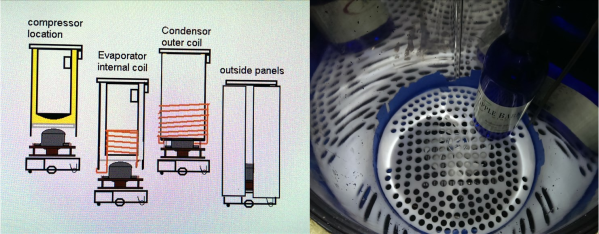
The build consists of two main parts: the refrigerated cooler and the butler part, which comes courtesy of a Roomba Discovery from a fellow roboticist. [Josh] is basing the design on double-walled and insulated restaurant coolers. He built the refrigerated beverage hold from two stainless steel trash cans, sized an inch or so apart in diameter, and filled the gap with expanding foam insulation. He then cut away several inches from the bottom of the liner can to make room for the cooling unit, reinstalled the drip tray, and made a [airflow-allowing platform] by drilling a bunch of holes in an antimicrobial plastic cutting board.
At first, he tried a Peltier unit from an electric Igloo cooler, but that doesn’t work as well as [Josh] hoped, so he’s redesigning the can to use a mini fridge compressor. This meant making custom evaporator and condenser coils from copper tubing to match the compressor’s load spec. Go through [Josh]’s build logs over on IO and you’ll get a free mini-course on expanding foam and refrigeration.
[Josh] is currently working on some different butler modes for this robot. These run the gamut from simply sitting nearby with cold beverages and opening with the wave of a hand to doing voice-triggered beverage butler-ing at everyone’s beck and call. We applaud his efforts thus far and will be following this one with great thirst interest to see how he handles navigation and voice control.