Electric vehicles are fertile ground for innovation because the availability of suitable motors, controllers, and power sources makes experimentation accessible even to hobbyists. Even so, [John Dingley] has been working on such vehicles since about 2009, and his latest self-balancing electric unicycle really raises the bar by multiple notches. It sports a monstrous 3000 Watt brushless hub motor intended for an electric motorcycle, and [John] was able to add numerous touches such as voice feedback and 1950’s styling using surplus aircraft and motorcycle parts. To steer, the frame changes shape slightly with help of the handlebars to allow the driver’s center of gravity to shift towards one or the other outer rims of the wheel. In a test drive at a deserted beach, [John] tells us that the bike never went above 20% power; the device’s limitations are entirely by personal courage. Watch the video of the test, embedded below.
Electric vehicles are fertile ground for innovation because the availability of suitable motors, controllers, and power sources makes experimentation accessible even to hobbyists. Even so, [John Dingley] has been working on such vehicles since about 2009, and his latest self-balancing electric unicycle really raises the bar by multiple notches. It sports a monstrous 3000 Watt brushless hub motor intended for an electric motorcycle, and [John] was able to add numerous touches such as voice feedback and 1950’s styling using surplus aircraft and motorcycle parts. To steer, the frame changes shape slightly with help of the handlebars to allow the driver’s center of gravity to shift towards one or the other outer rims of the wheel. In a test drive at a deserted beach, [John] tells us that the bike never went above 20% power; the device’s limitations are entirely by personal courage. Watch the video of the test, embedded below.
Continue reading “3000W Unicycle’s Only Limitation Is “Personal Courage””

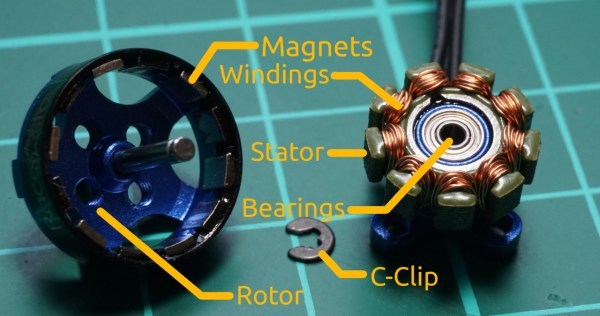
 [madcowswe] starts by pointing out that the entire premise of ODrive (an open-source brushless motor driver board) is to make use of inexpensive brushless motors in industrial-type applications. This usually means using hobby electric aircraft motors, but robotic applications sometimes need more torque than those motors can provide. Adding a gearbox is one option, but there is another: so-called “hoverboard” motors are common and
[madcowswe] starts by pointing out that the entire premise of ODrive (an open-source brushless motor driver board) is to make use of inexpensive brushless motors in industrial-type applications. This usually means using hobby electric aircraft motors, but robotic applications sometimes need more torque than those motors can provide. Adding a gearbox is one option, but there is another: so-called “hoverboard” motors are common and