As the open-source movement has brought its influence to more and more fields, we’ve seen an astonishing variety of things once only available at significant expense become accessible to anyone with access to the tools required to create them. One such arena is that of scientific instrumentation, and though we have seen many interesting developments there has been one which has so far evaded us. An analytical balance, a very specialised weighing machine designed to measure the tiniest of masses, remains available only as a new unit costing a fortune, or as a second-hand one with uncertain history and possible contamination. Fortunately, friend of Hackaday [Zach Fredin] is on the case, and as part of one of his MIT courses he chose to create an open-source analytical balance.
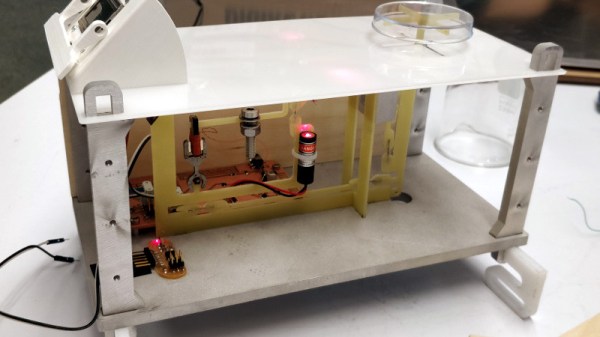
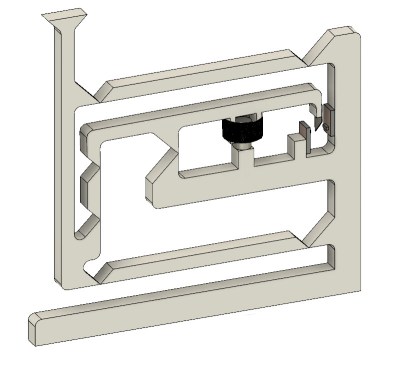 The write-up is interspersed with his course notes as he learns a series of fabrication techniques, but in addition to the milled Delrin finished model he treats us to his prototype and gives us an explanation of how these instruments work. It’s a technique that’s rather different to a traditional weighing machine: instead of measuring deformation of a spring in some way it produces a force from an electromagnet to oppose that exerted by gravity on the mass to be measured, and quantifies how much electrical energy is required to do that. The mechanism incorporates feedback through a vane and an optical sensor, which he admits he’s not yet had time to set up properly.
The write-up is interspersed with his course notes as he learns a series of fabrication techniques, but in addition to the milled Delrin finished model he treats us to his prototype and gives us an explanation of how these instruments work. It’s a technique that’s rather different to a traditional weighing machine: instead of measuring deformation of a spring in some way it produces a force from an electromagnet to oppose that exerted by gravity on the mass to be measured, and quantifies how much electrical energy is required to do that. The mechanism incorporates feedback through a vane and an optical sensor, which he admits he’s not yet had time to set up properly.
It’s an interesting project not least because it exposes some of the inner workings of an analytical balance, and we look forward to his completing it. If this whet your appetite for the topic it’s worth also looking at [Ben Krasnow’s] video of a balance made using a moving coil meter for an explanation of the technique.