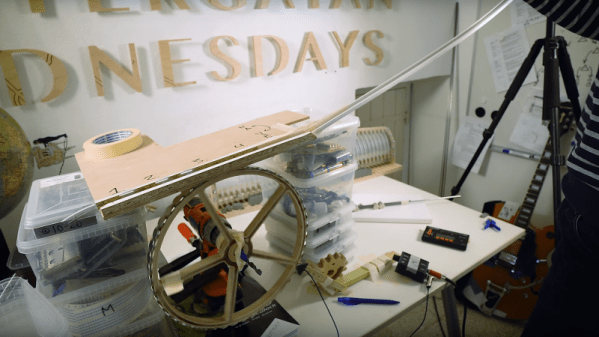
Take a couple of thousand steel balls, add a large wooden gear with neodymium magnets embedded in it, and what do you get? Either the beginnings of a wonderful kinetic music machine, or a mess of balls all stuck together and clogging up the works.
The latter was the case for [Martin], and he needed to find a way to demagnetize steel balls in a continuous process if his “Marble Machine X” were to see the light of day. You may recall [Martin] as a member of the band Wintergatan and the inventor of the original Marble Machine, a remarkable one-man band that makes music by dropping steel balls on various instruments. As fabulous a contraption as the original Marble Machine was, it was strictly a studio instrument, too fragile for touring.
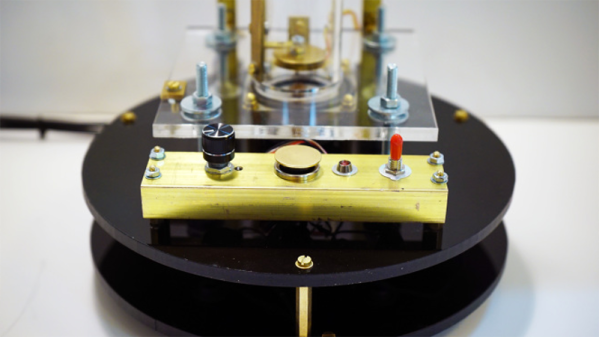
Marble Machine X is a complete reimagining of the original, intended to be robust enough to go on a world tour. [Martin] completely redesigned the lift mechanism, using magnets to grip the balls from the return bin and feed them up to a complicated divider. But during the lift, the balls became magnetized enough to stick together and no longer roll into the divider. The video below shows [Martin]’s solution: a degausser using magnets of alternating polarity spinning slowly under the sticky marbles. As a side note, it’s interesting and entertaining to watch a musician procrastinate while debugging a mechanical problem.
We can’t wait to see Marble Machine X in action, but until it’s done we’ll just settle for [Martin]’s other musical hacks, like his paper-tape programmed music box or this mashup of a synthesizer and a violin.
Continue reading “Keeping Magnetized Marbles From Stopping The Music”
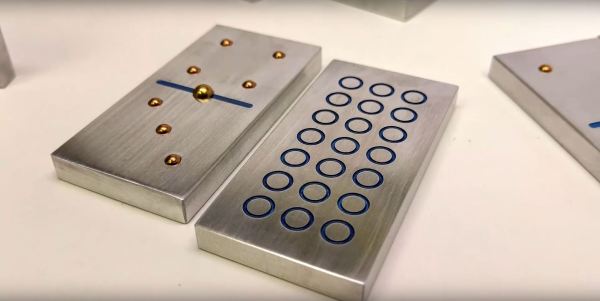


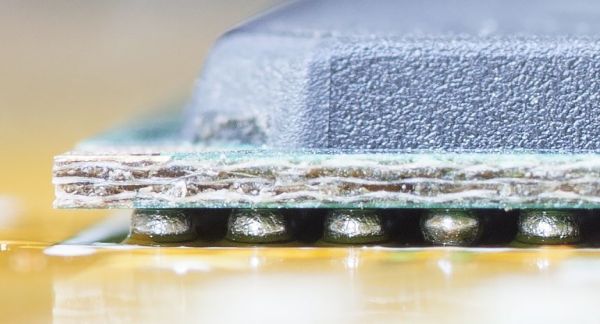
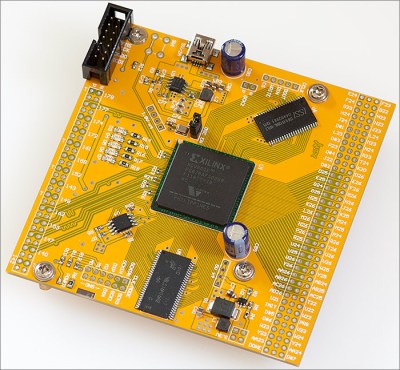 The project [Andy] had in mind for these chips was a generic dev board, which meant breaking out the IO pins and connecting some SRAM, SDRAM, and Flash memory. The first issue with this project is escape routing all the balls. Xilinx published a handy application note that recommends specific design parameters for the traces of copper under the chip. Unfortunately, this was a six-layer board, and the design rules in the application note were for 5/5mil traces. [Andy]’s board house can’t do six-layer boards, and their design rules are for 6/6mil traces. To solve this problem, [Andy] just didn’t route the inner balls, and hoped the 5mil traces would work out.
The project [Andy] had in mind for these chips was a generic dev board, which meant breaking out the IO pins and connecting some SRAM, SDRAM, and Flash memory. The first issue with this project is escape routing all the balls. Xilinx published a handy application note that recommends specific design parameters for the traces of copper under the chip. Unfortunately, this was a six-layer board, and the design rules in the application note were for 5/5mil traces. [Andy]’s board house can’t do six-layer boards, and their design rules are for 6/6mil traces. To solve this problem, [Andy] just didn’t route the inner balls, and hoped the 5mil traces would work out.









